


The aim of this study is twofold: Firstly, it will add to the theoretical knowledge in nonlinear control and state estimation of spacecraft, secondly it aims for the implementation of the theoretical developments on spacecraft simulator platform
This study intends to exploit the computational ability of high-speed digital computers to test the feasibility of PF and UKF for fusion of attitude information acquired by multiple sensors on-board the spacecraft and benchmark their performance with respect to EKF.
This project aims to implement both kinds of attitude estimation strategies described as follows:
One spacecraft acts as an active spacecraft equipped with sensing devices such as PSD, cameras or lidars, the other spacecraft has some fixed light beacons which act as features in the captured image or point cloud. The inactive spacecraft attitude changes due to its orbital motion and tumbling motion. During experimental stage this inactive spacecraft will be imparted with a known attitude change, the active spacecraft should estimate the current relative attitude. The relative attitude change will be validated against the true attitude change.
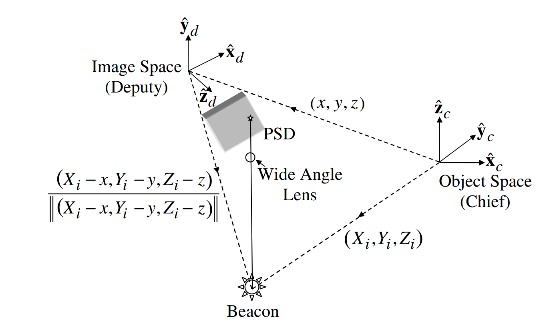
Measurements using PSD for relative spacecraft attitude estimation
An artificial laboratory scale star filed will be constructed, the star field will be visible to the cameras mounted on top of attitude dynamics simulator. The spacecraft will estimate its attitude with respect to the inertial star field.
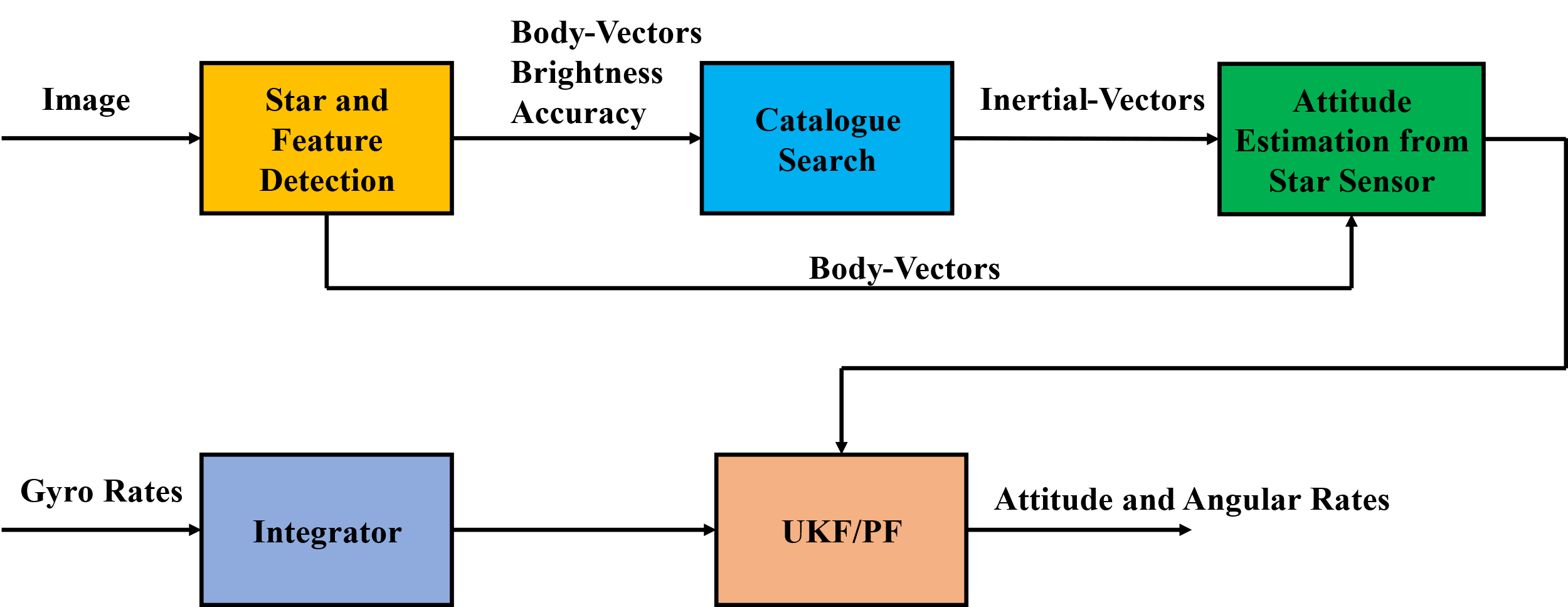
Attitude and angular rate estimation using star sensor in with respect to inertial frame
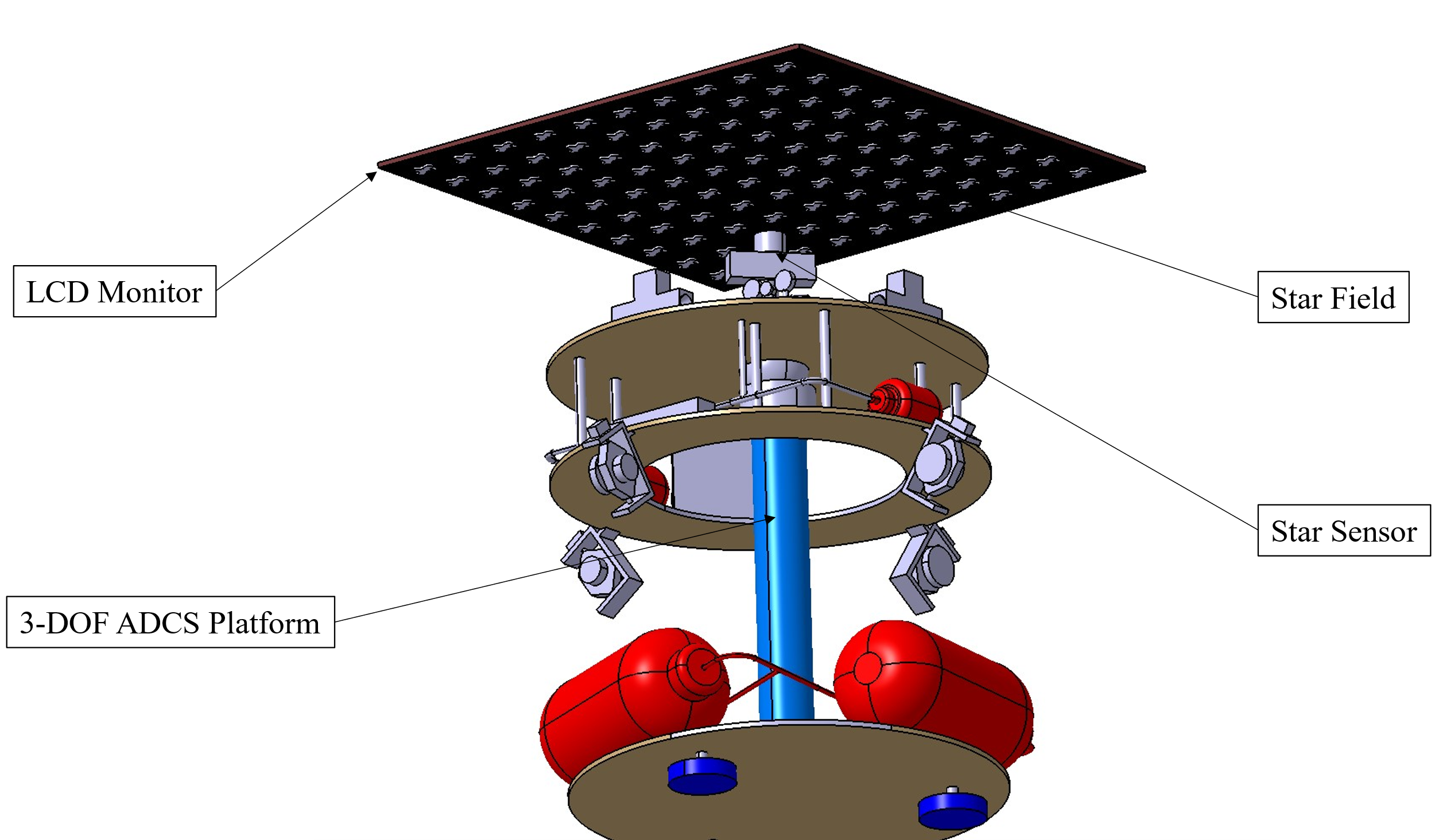
Attitude dynamics simulator and measurements using star sensor for attitude estimation
Along with attitude estimation this research aims to develop robust control algorithms for attitude control of spacecraft. Attitude control is a fundamental process for any space-based operation. Nonlinear control methods such as feedback linearization, backstepping, and sliding mode control have been designed and implemented in simulation, from which some of the work have been submitted to reputed conferences. Finally, these control algorithms will be implemented on the spacecraft dynamics simulator and these control laws when implemented get the attitude and angular rate feedback from the estimation module using EKF, PF and UKF. Therefore, at the end of this project, there will be comprehensive data to compare among the control algorithms and the sensor fusion algorithms which will aid in designing the control and estimation systems for future space missions.